인공지능 기반의 로봇은 인간의 삶을 향상시킬 수 있는 상당한 잠재력을 갖고 있으나, 아직은 넘어야 할 산이 많다. 로봇을 구축하고 트레이닝 하는 과정이 쉽지 않기 때문이다. 그러나 이 과정이 단축될 전망이다.
엔비디아 CEO인 젠슨 황(Jensen Huang)이 8회 엔비디아 GPU 테크놀로지 컨퍼런스(GPU Technology Conference, 이하 GTC) 기조연설에서 인텔리전트 머신의 구축 및 트레이닝 과정을 근본적으로 단순화하는 획기적인 기술인 엔비디아 아이작(NVIDIA Isaac) 로봇 시뮬레이터를 소개, 로봇 산업의 새로운 시대를 선보였다.
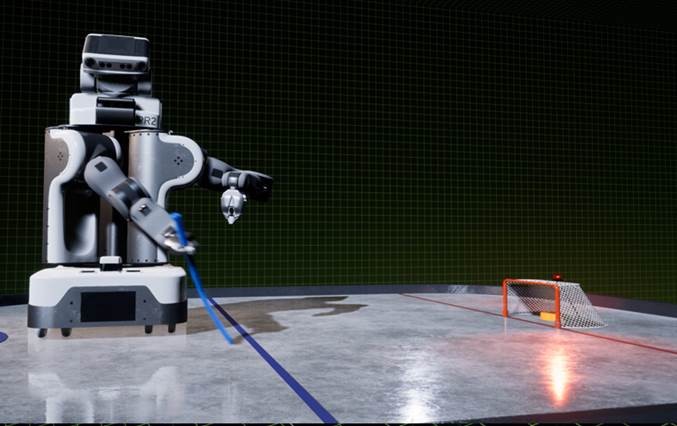
엔비디아 아이작 로봇 시뮬레이터는 인텔리전트 머신이 실제 배포 되기 전, 첨단 비디오게임 및 그래픽 기술을 기반으로 시뮬레이션 된 현실 세계 조건(real-world condition)에서 머신을 트레이닝 할 수 있는 기술이다. 또한 엔비디아 젯슨(NVIDIA Jetson) 플랫폼을 기반으로 인텔리전트 머신의 구축을 가속화하는 로봇 레퍼런스 디자인 플랫폼도 함께 소개됐다.
이번 GTC에서는 전 세계에서 모인 50여개 이상의 기업들이 다양한 역량을 지닌 로봇들을 선보이고 있다. 엔비디아 젯슨 플랫폼을 탑재한 이 로봇들은 단말 기기 상에서 복잡한 데이터를 보다 신속하고 효율적으로 처리할 수 있으며, 수색 및 구조와 고령자 지원뿐만 아니라 긴 시간이 요구되거나 잠재적 위험성을 지닌 작업을 산업 현장에서 자동화하는 등의 중요한 업무를 처리할 수 있다.
로봇은 실제 배포에 앞서 광범위한 트레이닝 및 테스트를 거쳐야 한다. 물리적 프로토타입 생성까지를 모두 고려하면, 이 과정들은 막대한 비용이 발생하는 비현실적인 과정이 될 수 있다. 또한 로봇이 상호작용을 진행하게 될 복잡한 환경을 조성하는 작업은 안전하지 않거나 매우 복잡할 수 있으며, 로봇과 주변 환경 간에 이루어질 수 있는 모든 상호작용을 모델링 하는 것에도 상당한 시간이 소요된다.
아이작 로봇 시뮬레이터는 인공지능 기반의 소프트웨어 플랫폼을 기반으로 고도로 실제와 같이 구현된 가상 환경에서 로봇을 트레이닝 시킨 후 이를 통해 확보된 지식을 현실 세계에 배포되는 로봇에 전송해 기존의 로봇 구축 과정을 향상시킨다.
엔비디아 아이작은 에픽게임즈(Epic Games)의 시뮬레이션 및 실시간 렌더링 개발 도구인 언리얼 엔진 4(Unreal Engine 4)이 활용된다. 가상 환경 내에서의 작업을 통해 개발자들은 딥 러닝 트레이닝을 이용한 방대한 테스트 시나리오를 설정할 수 있으며, 설정된 테스트 시나리오를 단 수분 내로 시뮬레이션 할 수 있다.
시뮬레이션을 성공적으로 완료하고 난 후에는 해당 정보를 신속하게 현실 세계의 로봇들에게 전송할 수 있다. 이후 개발자들은 로봇 테스트 방식을 반복 및 수정하고, 축적된 정보들을 가상 환경과 실제 환경 간에 주고 받을 수 있다. 아이작 내에서의 시뮬레이션은 상당히 실제와 흡사하고 신속하게 수행될 수 있어, 기존의 개발 방식과 비교해 아이작을 활용했을 경우 최종 결과물에 적용되는 변경 사항의 수도 적어진다.
한편 젯슨 기반의 로봇 개발의 가속화를 위해 엔비디아 파트너 기업들은 드론, 수중 드론, 바퀴가 달린 로봇, 기타 장치들을 위한 레퍼런스 플랫폼을 오픈 소스로 배포하고 있다. 이러한 플랫폼들은 개발자들이 보다 쉽게 프로토타입을 제작할 수 있도록 지원하는 기본 구성 요소들을 제공해 로봇 제작의 기초 단계에서부터 소요되는 시간과 비용을 절감시킨다.
인간 지원 로봇 분야의 토요타(Toyota), 소비자용 드론 분야의 틸(Teal), 산업용 드론 및 무인 주행 차량 분야의 엔루트(Enroute)와 더불어 스케일 모델 자율주행차량 분야의 다양한 대학 및 학문 연구 기관 등이 현재 젯슨 레퍼런스 플랫폼을 공개 한 바 있다.
이향선기자 hslee@nextdaily.co.kr